ROV Thrusters
There are several possible avenues that can be followed for the Thrusters on the ROV. The simplest is to do the same as on the OpenROV project where brushless outrunner motors are exposed to the water. Other projects have made use of small 12V DC bilge pumps (ideally brushless). Another option is to adapt the OpenThruster Project idea and encapsulate the brushless DC Outrunners in a container that is filled with oil. A final option is a magnetic coupling between the coils within some sealed motor pods and the magnets embedded in a propeller arrangement.
For the sake of simplicity the initial design presented here makes use of the OpenROV approach and utilises the same items of kit….more or less.
2213N 800Kv Brushless motor. This is the same as the OpenROV uses. The motor is in direct contact with the water. I must admit I was surprised to see this as their solution. It seems OK in fresh water but I have my doubts when it comes to use in sea water and with the risk of corrosion. (Additional note - 4th Feb 2015) I see that others in the OpenROV world have experienced exactly this problem with the bearings “rusting like a bastard” and have put up a small tutorial on retrofitting the motors with more suitable bearings and providing a protective coating over the motors. I have upgraded the motors on my ROV in teh same way. The process I used is described on this page - ROV Motor Upgrade.
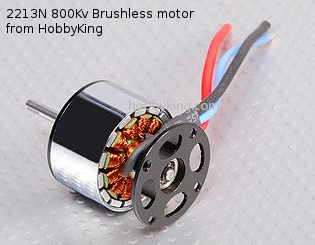
The Specs for this item are:
- 3mm diameter shaft
- Max current 9.5A
- Runs on 11V (3S Lipo Batteries)
HobbyKing® ™ Brushless Car ESC 10A w/ Reverse. This is not the _Electronic Speed Controller_ recommended by the OpenROV project and I suspect that as it is for 2S LiPo batteries rather than 3S LiPo batteries I may have problems with not being able to supply enough power to the motors to get quite the same level of thrust as the OpenROV achieves. Whoops I should have read all the specs before adding these to my shopping cart. The critical thing for an ESC in this application is the forward and reverse which the aircraft ESCs don’t have (for obvious reasons) - unfortunately ruling out a heap of really good ESCs. For design purposes the current interior layout of the ROV uses the HobbyWing EZRUN 18A ESCs as used by the OpenROV, this will allow smaller ESCs to fit into the same space easily without needing to redesign.
The Specs are:
- Input voltage: 1-2S Lithium batteries / 3~8 Ni-xx
- Cont. Current: 10A
- BEC output: 1A/5V (Linear)
- Size( length X width X high): 22x17x7mm
- Weight: 8g
Test results for this arrangement can be found on this page.
If these start to have problems when operating immersed, then I will turn them into something similar to the Open Source Thruster Project.
The Propellors I used were purchased through Aliexpress. Because the presence of particular merchants on *Aliexpress are quite fluid, the best directions I can give are to provide the title of the product which is “Set 3 Blade Nylon Propeller P1.4 Dia 47mm 52mm 55mm 57mm For 3/16 Shaft RC Boat”. This is a set of four props of different sizes, so you will need at least two sets. They are about $3-4 US for a set. They are quite good thruster props and get a good “grip” on the water.
Update 24th November 2015: I finally dug out my ESC programming card the other day to adjust the voltage cut-off point to something more appropriate to the LiFePO4 batteries I am using. I found that the voltage cut out was disabled. This means that the ESCs were over heating a little during the latter part of the pool trial. i guess I shouldn’t be surprised. I will need to use the HobbyWing EZRUN 18A ESCs instead. I have a bunch ordered from Aliexpress and will hopefully see them within the next week.
Update 2nd December 2015: The HobbyWing EZRUN 18A Car ESCs have arrived and are being installed in the ROV. This has required reprogramming the ESCs and development of a new calibration sketch to suit the different calibration process these ESCs require. Details of this process can be found in the following article: Programming and Calibration the EZRUN 18A ESCs
The Basic Specifications for the HobbyWing EZRUN 18A Car ESCs are;
- Continuous Current: 18A
- Burst Current: 50A
- Resistance: 0.01Ω
- Suitable for Battery Cells: 2S LiPo and 3S LiPo
- BEC Output 6V/1A
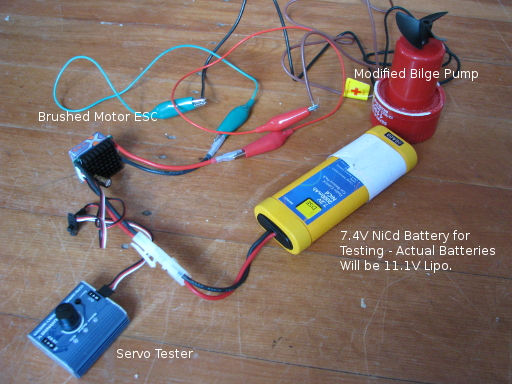
Submersible Bilge Pump The alternative system that I am playing around with is to use submersible bilge pumps as the thrusters. They were designed to work underwater and operate on 12V. I have purchased one through Aliexpress. It’s not the the biggest, but at 1000 gallons per hour flow when used as centrifugal sub-pump it really pushed the water out. As a thruster using a propeller and removing the casing the thrust is less – but if I duct it it should be equal to or greater than what the OpenROV thrusters achieve. The current is only 3A.
The motor appears to be a brushed DC motor and it’s direction can be controlled by reversing the polarity of supply to it. When in the ROV a Brushed DC ESC suitable for cars can be used to control the pump. The 40A one shown below is a bit overkill, but it was the smallest I could find at the time. This ESC can do forward and reverse.
This seems like a good alternative. The only thing that makes me nervous is that it is a brushed motor and it will be subjected to depths far in excess of what it would handle when just pumping out a yacht bilge. To test this I will drop the motor down to a moderate depth off the end of a wharf and see if it still goes afterwards.
The Bilge Pump Specifications are:
- Type: Non-Automatic
- Flow Rate: 1100GPH
- Hose: 1-1/8”
- Voltage: 12 Volts
- Current Draw: 3 Amp
- Application: Submersible Water Pump
The Unmodified Bilge Pump

The Modified Bilge Pump now a thruster or at least an egg whisk.

The modified bilge pump test rig.