ROV Brushless Thruster Testing
After a conversation with another ROV builder (featured in the Shed Magazine October/November 2014 edition – www.theshedmag.com) I became a little worried about my selection of motors and propellers I had used in my design. After all, I had just carried over the OpenROV selection assuming they had got that right at least.
My selection of propellers was dictated by what I could find at the time. I found a supplier in Aliexpress who had packs of fairly simple 3 bladed plastic propellers. Each pack had four propellers in sizes ranging from 47mm diameter up to 57mm in diameter. I attempted to measure the pitch of each and came up with the figures listed below which seemed reasonable. The propellers I used in the tests were;
- 47mm diameter 55.5 pitch.
- 52mm diameter 60mm pitch.
- 57mm diameter 66mm pitch.
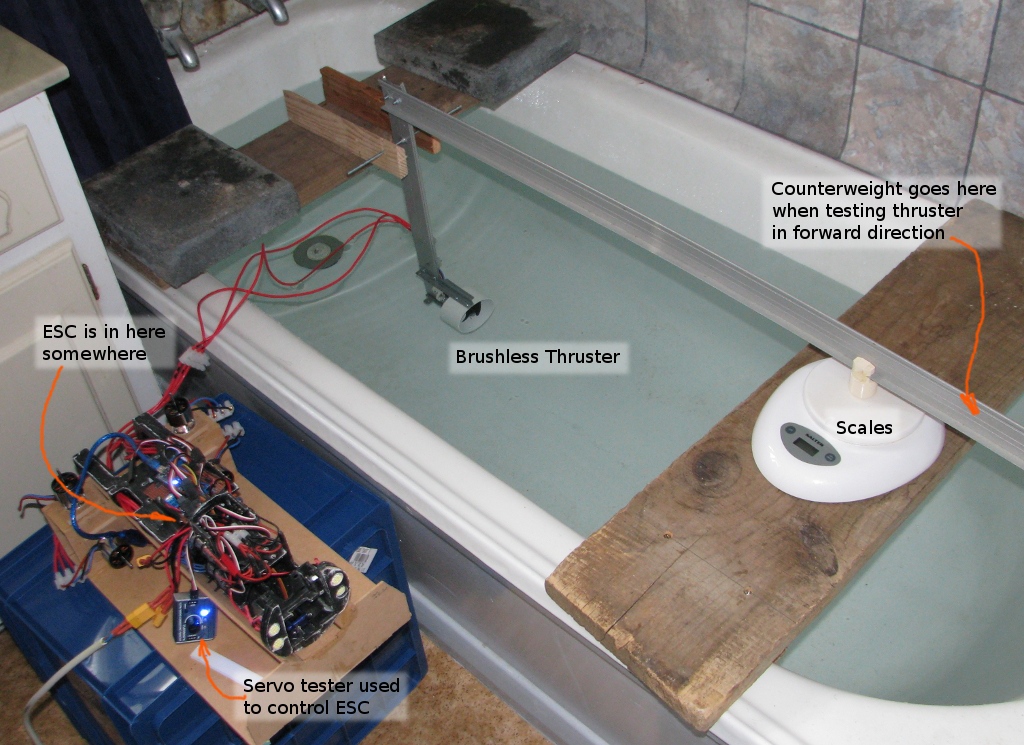
I designed a thrust testing rig to trial several of the propellers mounted on a 2213N 800Kv Brushless motor (The same type as the OpenROV uses). To drive it I used one of the HobbyKing Brushless Car 10A ESCs that are currently installed on my ROV. I used a servo tester to provide the throttle signal to the ESC. Electricity was supplied to the ESC from a variable voltage power supply set to deliver 9.6V to simulate the LiFePO4 batteries I am using.
To test the thrust, I manufactured a pivoting arm which would press down on some scales as shown in the photos below. The arm was made from some aluminium section that was lying around under the house, the pivot was just a piece of threaded rod, while the attachment for the motor and the knob that presses on the scales were both 3D Printed. I included the ducting that will be around the thrusters because this will influence the flow patterns and hence the thrust.
 Click here to get a higher resolution version.
ROV Brushless Thruster Testing Rig
Click here to get a higher resolution version.
ROV Brushless Thruster Testing Rig
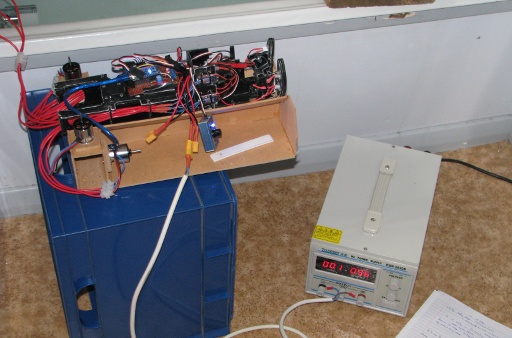
ROV Brushless Thruster Testing Rig Electrical Supply

ROV Brushless Thruster in the bath
The thruster was tested running in both directions. To get readings when the thruster would ordinarily try to lift the arm off the scales, I added a bit of dive belt weight to the arm and zeroed the scales so that I could get negative readings. While this arrangement is not shown in the photos, if you imagine a lump of lead (860g) hooked over the end of the long arm just beyond where the scales are, you will have a good idea of what it looked like. The whole lot was set up in the bath in an attempt to keep the thruster clear of any influence from the water jet hitting the walls. A bigger tub or pool would have been better but heh – it did the job. The only reason the ROV interior is present in this experiment was because I could not be bothered removing the ESC from the rig. I found quite quickly that I needed to add some good weighty concrete pavers to the wooden plank holding the thruster pivot – otherwise the thruster, and plank would have ended up at the end of the bath and the scales would probably have taken a swim.
To test the thruster I increased the speed, took a reading of the current to the ESC, and read the scales. The thrust applied to the scales was not steady, and so the figures I read off were estimates of the average about which the thrust was varying for a particular setting. The same sort of test was run for the forward and reverse directions and for each of the propellers tested.
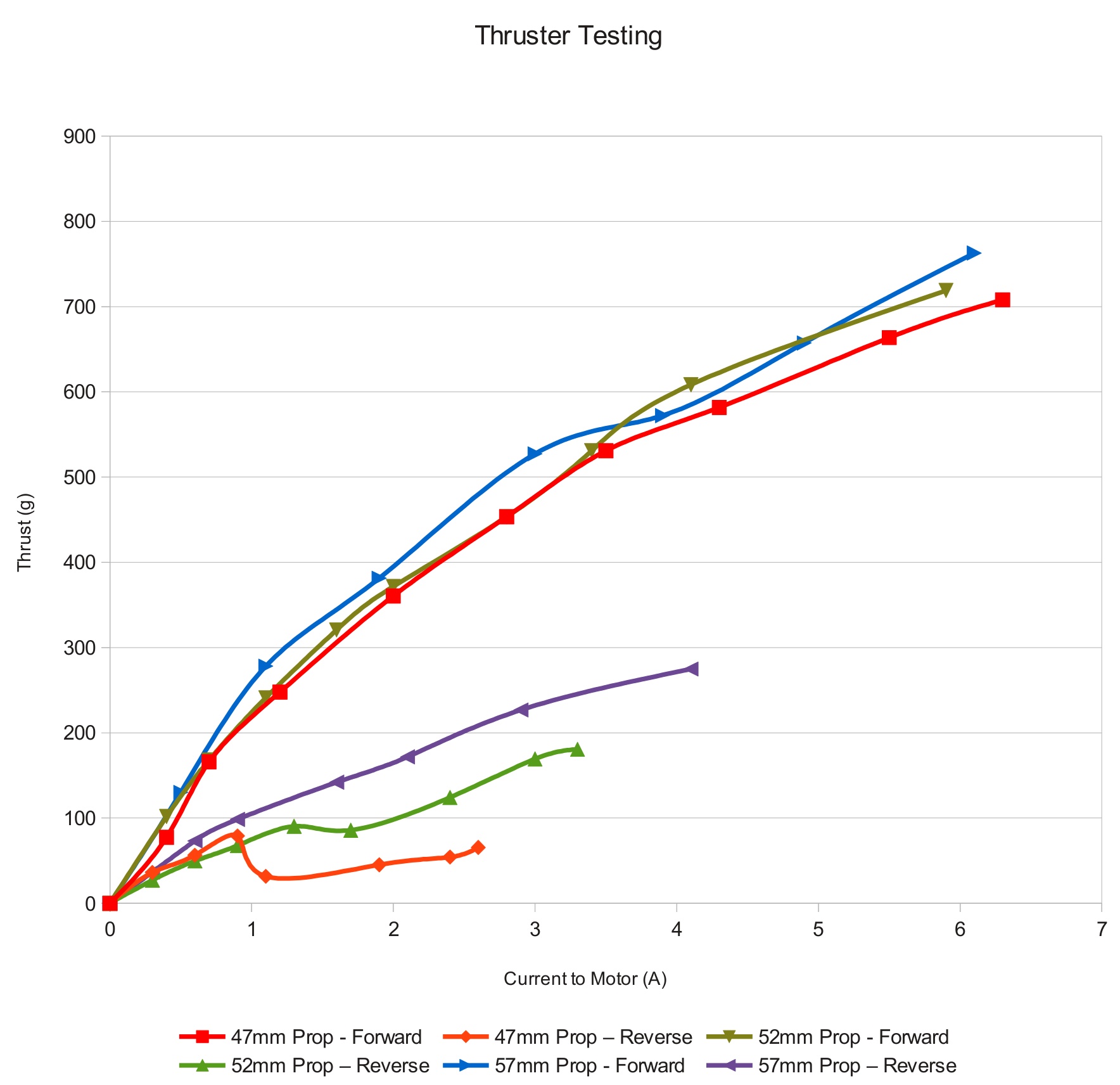
Anyway here are the results.
| Diameter: 47mm | |||
| Pitch: 55.5mm | |||
| Forward | Reverse | ||
| Current(A) | Thrust (g) | Current(A) | Thrust (g) |
| 0 | 0 | 0 | 0 |
| 0.4 | 77 | 0.3 | 36 |
| 0.7 | 166 | 0.6 | 56 |
| 1.2 | 248 | 0.9 | 79 |
| 2 | 361 | 1.1 | 32 |
| 2.8 | 453 | 1.9 | 45 |
| 3.5 | 531 | 2.4 | 54 |
| 4.3 | 582 | 2.6 | 65 |
| 5.5 | 664 | ||
| 6.3 | 708 | ||
| Diameter: 52mm | |||
| Pitch: 60mm | |||
| Forward | Reverse | ||
| Current(A) | Thrust(g) | Current(A) | Thrust(g) |
| 0 | 0 | 0 | 0 |
| 0.4 | 102 | 0.3 | 27 |
| 0.7 | 168 | 0.6 | 50 |
| 1.1 | 241 | 0.9 | 68 |
| 1.6 | 321 | 1.3 | 90 |
| 2 | 372 | 1.7 | 86 |
| 2.8 | 453 | 2.4 | 124 |
| 3.4 | 531 | 3 | 169 |
| 4.1 | 608 | 3.3 | 181 |
| 5.9 | 719 | ||
| Diameter: 57mm | |||
| Pitch: 66mm | |||
| Forward | Reverse | ||
| Current(A) | Thrust(g) | Current(A) | Thrust(g) |
| 0 | 0 | 0 | 0 |
| 0.5 | 130 | 0.3 | 37 |
| 1.1 | 278 | 0.6 | 73 |
| 1.9 | 381 | 0.9 | 98 |
| 3 | 527 | 1.6 | 142 |
| 3.9 | 572 | 2.1 | 172 |
| 4.9 | 657 | 2.9 | 227 |
| 6.1 | 763 | 4.1 | 275 |
 Click here to get a higher resolution version.
Click here to get a higher resolution version.
You can download the analysis spreadsheet here if you are really interested. It is in a LibreOffice format.
Each run in the forward direction ended with the ESC cutting out. This indicated to me that the ESCs are good at protecting themselves – which is a good thing. And that I probably want to use slightly more powerful ESCs.
Update 2nd December 2015 The ROV ESCs have been replaced with HobbyWing EZRUN 18A Car ESCs. This has required reprogramming and calibrating the ESCs. This process is described in this article: Programming and Calibration the EZRUN 18A ESCs
What surprised me about the tests was that there was so little difference between the three propellers in the forward direction. I’m sure if I had a tachometer that would have shown a somewhat different picture, but as far as power into the propellers vs thrust out goes, there was little difference. It was a very different story in reverse where the 47mm propeller was reasonable to a point, but then seriously drops out – probably as a result of a change in the flow characteristics through the blades. When I looked at the flow through the thruster at this point it looked to be stalled with the propeller spinning madly kicking out water in all directions.
Out of the limited selection of propellers I have available this test indicated that the 57mm diameter propeller was the best all round performer. Putting out around 7.8N (780g) of Thrust at 6A. I suspect that this output would not be able to be sustained for particularly long before the thermal protection would cut in to rest the ESC.
To put this into perspective I did some back of the envelope calculations on the thrust likely to be required to push this not-at-all-streamlined ROV through the water. It was a relatively easy calculation because the drag coefficient for everything turned out to be 1.0. Indications are that the ROV as it currently is configured will require at least 15N of thrust to move at 0.5m/s. This means each thruster must be able to deliver about 7.5N (750g) of thrust. The motor, ESC, Propellor selection used in this test just manages this. A bit more leeway will be required for the ESCs so that the pilot does not get frustrated with them tripping all the time – but that is easily remedied.
I will test the bilge pumps on a similar rig. It will be good to have some results from that to use as a comparison.