Bath-time for the ROV
This was an exercise is seeing how quickly I could flood the bathroom. I found that I was quite successful at this and had the floor awash within seconds of putting the ROV into the bath for a quick trial.
The primary purpose of this trial was to assess the buoyancy and any tendency for the ROV to roll over. I did this trial without the electronics installed but used the old electronics support frame loaded with lead to simulate the loaded ROV. As expected the ROV floated relatively high and required around 2.5kg of extra ballast to achieve a more or less neutral buoyancy. I was pleased to see that the ROV did not have a tendency to roll over either. I shall cast some lead ballast that can be fitted between the lower PVC frame bars to approach the neutral buoyancy weight and also add extra stability. I attempted a very rough displacement measurement using pencil marks on the bath and a measuring jug. It appears the displacement of the ROV is roughly 11.5L.
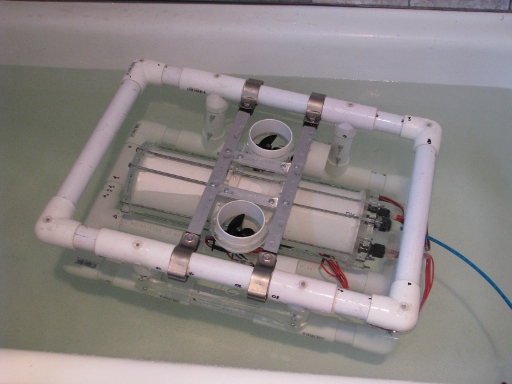
The unballasted ROV undergoing a bouyancy trial in the bath.

This was an attempt to measure how much ballast would be needed to sink the ROV. Apparently it requires more than two 500mL tubs of water. Perhaps if I didn’t use “Lite” margarine containers?
With that trail out of the way I decided to open the pod up again and install the electronics to do a proper trial. With the ROV being too buoyant the vertical thrusters are sitting a little too high to get a good “grip” on the water, but they are pretty good at throwing the water around as I soon found out.
Here is a video of part of the trial once I had figured out that I should go easy on the controls to avoid having to mop up too much more water later.
I had the video feed running to a monitor, but the view from the ROV was so unexciting that I did not bother capturing any of that.
On the whole I was very pleased with the performance and now need to add the ballast and get the ROV into a pool where it has a bit more room to move about.
You can find the description of the pool trial here: Trial No 2 - The Pool.