Trial No 2 - The Swimming Pool
With 2kg of lead strapped to the ROV, the next step was to try it out in a larger body of water to get some depth over it and also give it a good chance to show its capabilities. This trial was also going to answer a few questions about the stability of the ROV, and whether the ESCs would stand up to more extended use.
We had a box full of cameras and batteries, and my Uncle (whose pool we used) had a nifty diving camera which he used to get some of the underwater shots of the ROV that I have compiled into the video below. The screen I used for this trial was a Foxtech high brightness screen designed for use outdoors as an FPV monitor. Amongst the many inputs it accepts, it can take a standard video feed. Anything that can accept a video feed will work; video goggles, portable DVD players, etc.
Click on the Image to go through to Youtube to view the video.

If you would prefer to download the 217Mb MP4 file from somewhere other than Youtube, you can obtain it from my Box.net repository. The link is here: https://app.box.com/s/lf4t7po3ce8fmntoeusxjb5b74qx0anf
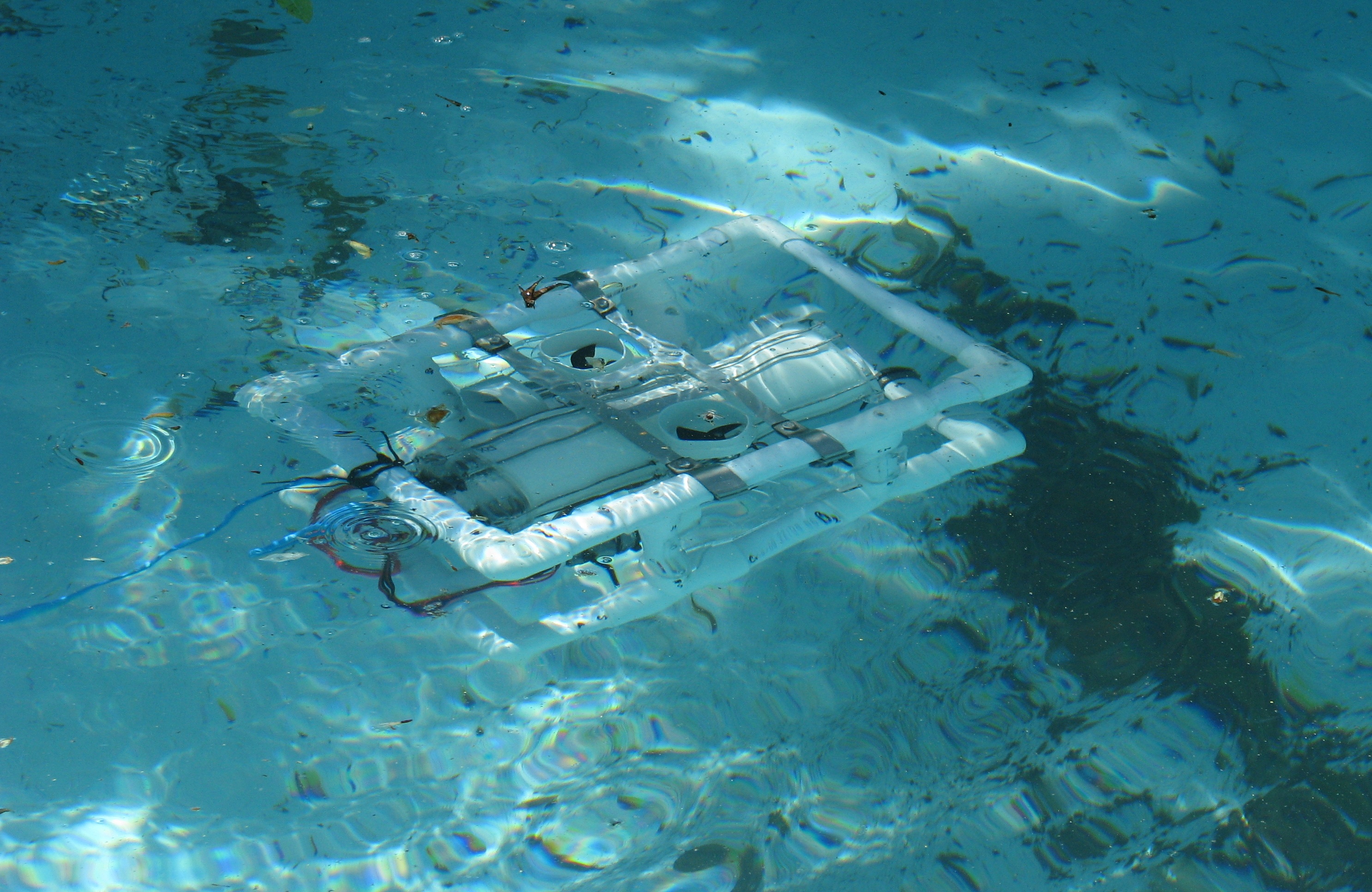
As you can see from the video, the ROV performed exceptionally well. It was responsive, quick enough, and behaved exactly as it should have. At the end of the trial the electronics pod was bone dry.
Observations from the trial
The tether is not neutrally buoyant. As more tether is let out, it starts to drag the ROV down. In use in a sea or a lake this presents a real risk of the tether snagging on rocks and submerged branches. It will also cause the ROV to sink rather than float if things go wrong. I will add small floats to the tether (at 5m intervals probably) to counter this.
I noticed that periodically the ROV would slew around when it was supposed to be going straight. This was being caused by one of the ESCs cutting out. The cut out was very short term. If the throttle was released, then pressed forward again it would operate fine for a short period before cutting out again. Initially I had thought this was due to a low voltage cutout setting on the ESC to protect LiPo batteries (I am using LiFePo4 batteries which are lower voltage) but when I checked the ESC’s programmed settings I found that the voltage cutout was not enabled. Blast! That means the ESC is overheating. I will need to replace them with the HobbyWing EZRUN 18A ESCs instead. Luckily I allowed sufficient space for these just in case.
Update - 2nd December 2015: The HobbyWing EZRUN 18A ESCs have arrived and will be installed shortly. They needed reprogramming and calibration. The details of this process can be found in this article: Programming and Calibration the EZRUN 18A ESCs
On a less important note, I found myself a little inept controlling the ROV because the controls I have chosen do not conform to the RC aircraft mode 2 controls I am used to. I found myself rolling the ROV at times when I meant to yaw it. I may change this.
Some Images
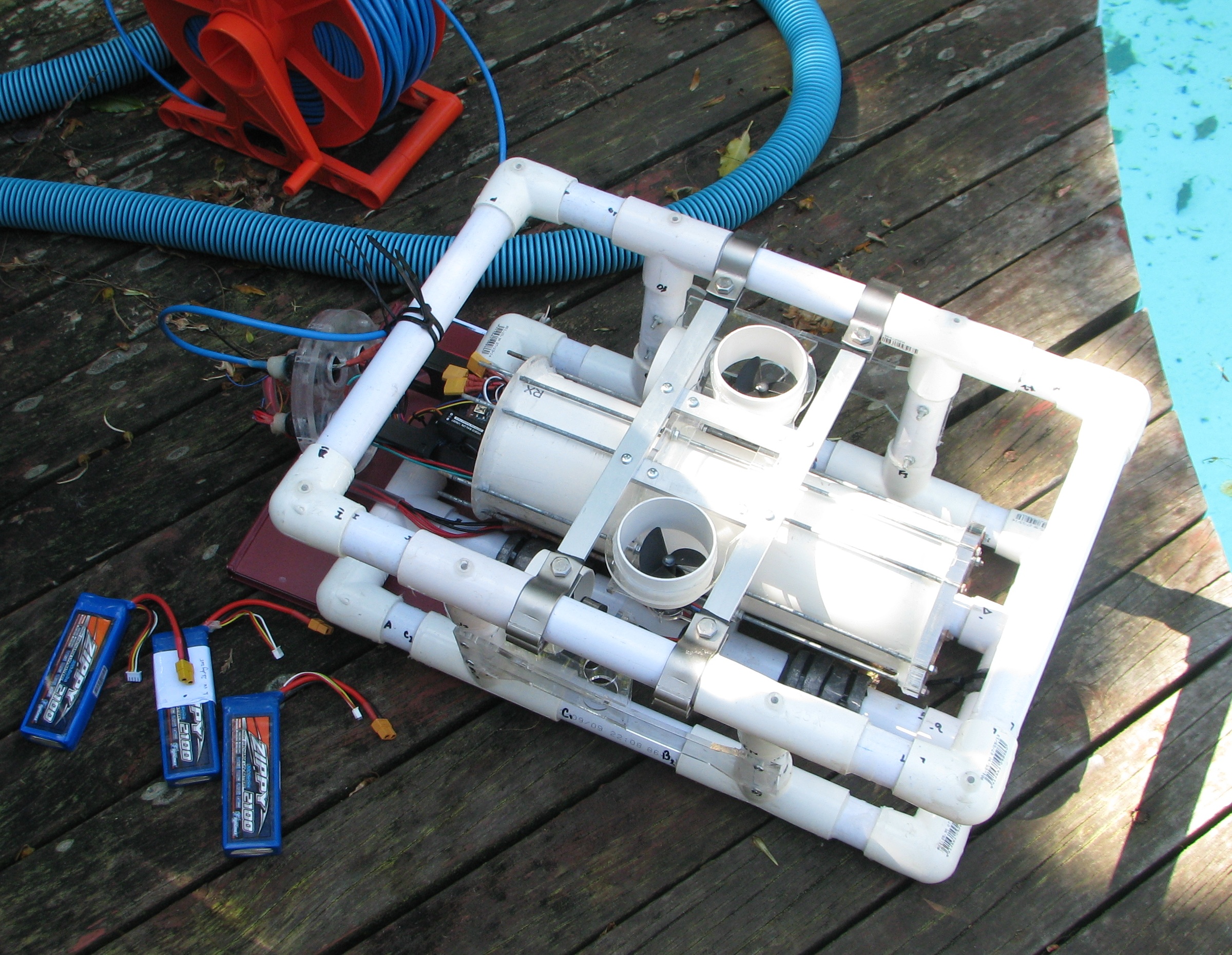
The batteries ready to install.

Securing the back cover of the ROV.
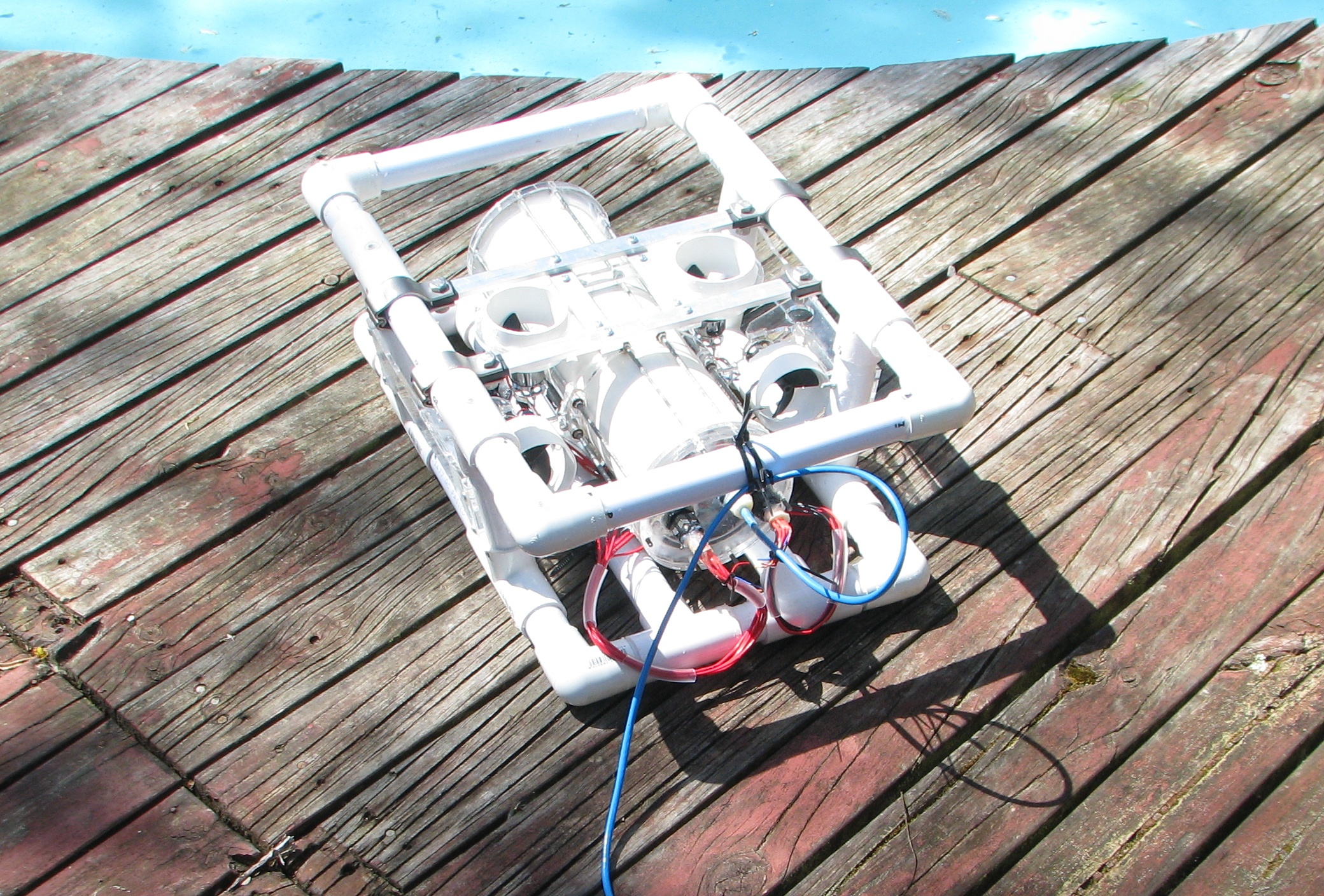
ROV ready to go and standing by for launch.
The ROV in action.

The driver’s seat.
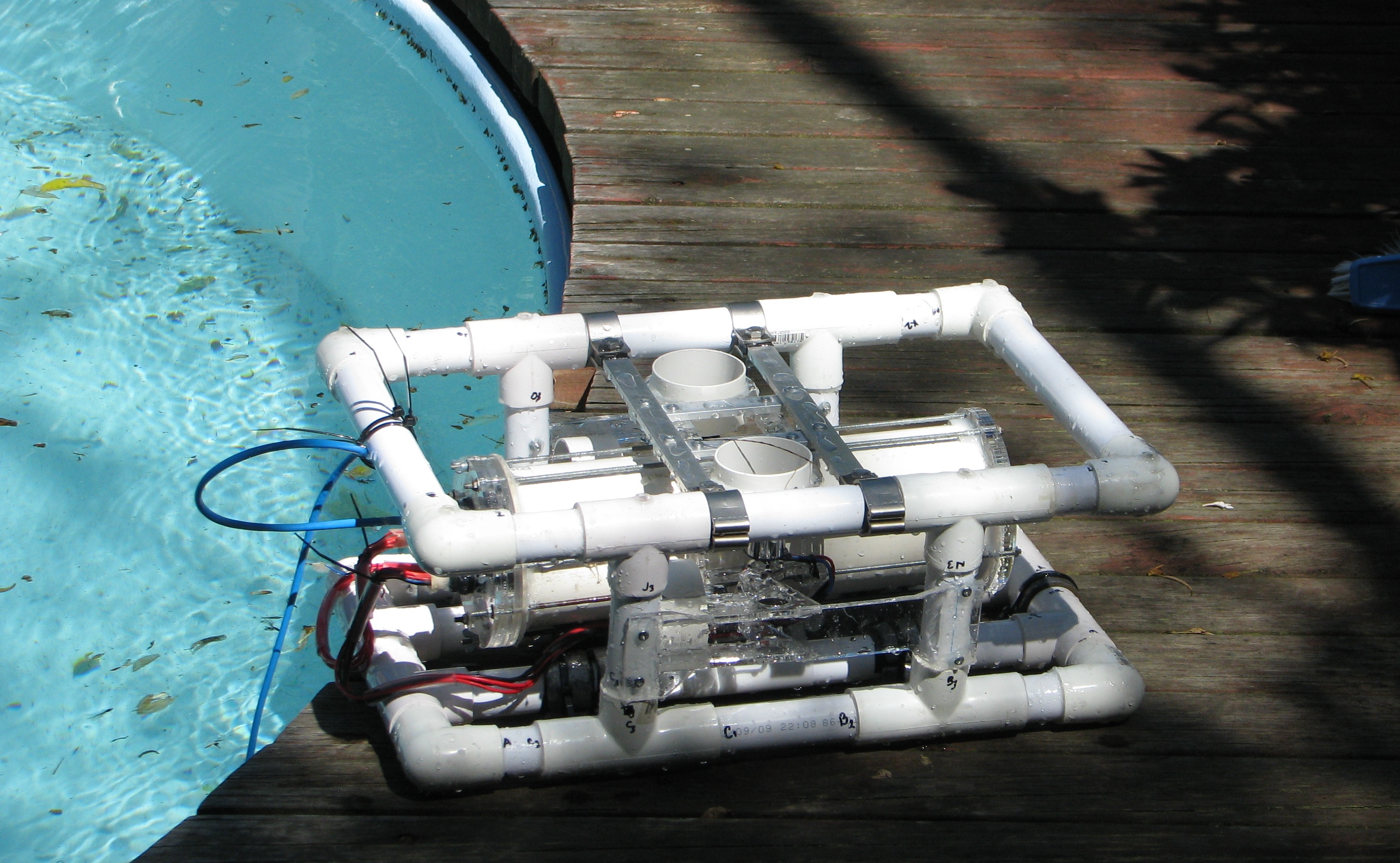
Back on dry land after the test.