RC Glider NiMh Battery Pack Monitor
The Slope Soaring Wing Electrics

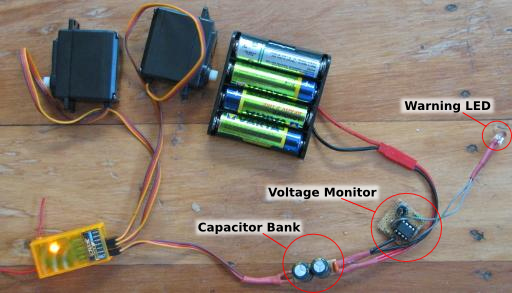
I have been building a slope soaring wing out of Corflute which will carry a four cell NiMh battery pack to power the receiver and servos. Past experience with the WickedWing XL has taught me that when the battery pack runs low, reception is lost and it falls out of the sky. Luckily the WickedWing XL is a very robust glider and hitting the ground at speed does not seem to damage it significantly. Despite this I would rather not have my plane fall out of the sky because the batteries are depleted. So, to help me monitor the state of the batteries while in flight I have devised a small battery monitor that will light an LED when the voltage across the pack gets too low.
LED Off: Healthy battery pack voltage.
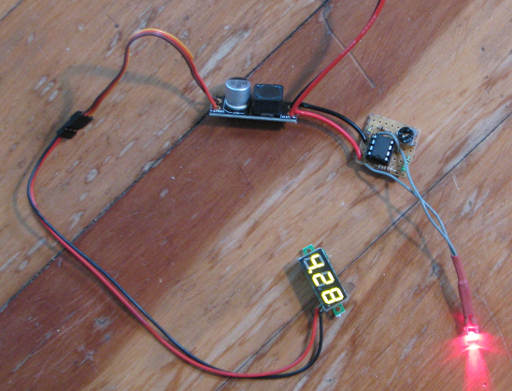 LED On: Time for to change the batteries.
LED On: Time for to change the batteries.
I was originally intending to use an LM311 comparator as I did for the 12v monitor, but the LM311 requires between 5V and 15V to run. With only 4.8V to work with the LM311 was clearly not an option without adding an extra battery pack to run the comparator – which does not make sense. I had encountered the Maxim 8211 comparator chip in a book “Electronic Projects for Model Aircraft” by Ken Ginn. The Max8211 can operate with supply voltages between 2.0V and 16.5V. It also includes a 1.15V reference voltage. So I built this little circuit to detect when the voltage across the pack got down to around 4.25V per cell which is about the voltage when the battery pack is about halfway depleted and things could start going badly onboard.
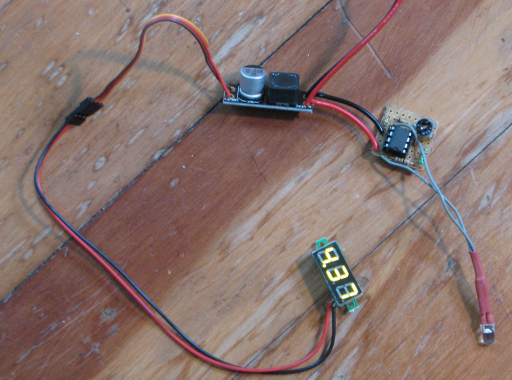
“Designing” the circuit was very straight-forward, mainly because the Datasheet for the Max8211 describes most of the circuit and how to calculate the resistor values for whatever trigger voltages you are after. All I did was add an LED and hook it to a bank of capacitors to smooth the draw off from the batteries and reduce the amount that the LED flickers when the servos are moved. In my first version of this I used an LC Filter from Banggood with the view that this would create flicker-free operation of the monitor, but it didn’t do it quite as well as I had hoped, thus the need for a bunch of capacitors instead. This earlier edition is shown in the two photos above. With the capacitor bank in place the LED does not flicker under normal movement of the sticks. I found the more capacitance I added the better it was, but adding the little ceramic capacitor as well seemed to help. I guess it can respond faster than the two large electrolytic capacitors. Don’t quote me on that though.
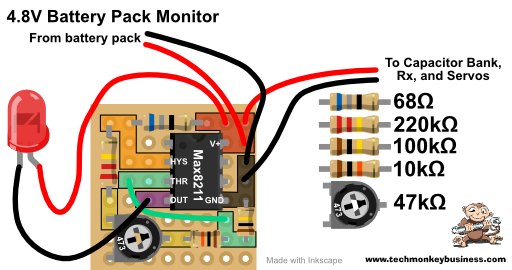
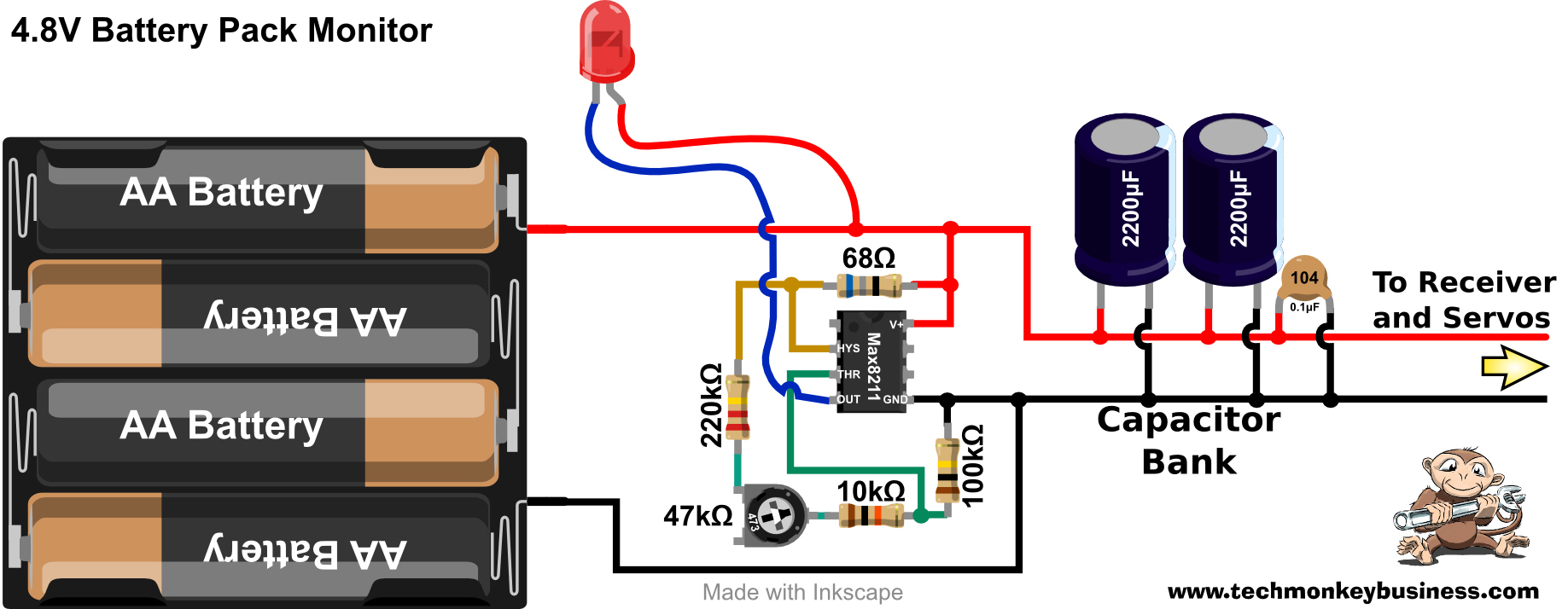
So here’s the circuit.
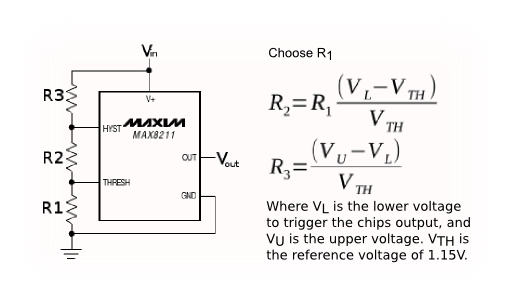
This is the information from the Max8211 datasheet.
I have used three resistors including the variable resistor to achieve the target value of 267kΩ for the resistance R2. This was mainly because these were the resistors I had around, and the addition of the extra 10kΩ allows me to adjust the variable resistor a little bit more to set the trigger point to be exactly what I want. The small 68Ω resistor R3 was chosen to achieve a very small amount of hysteresis.
I have included a small spreadsheet to calculate the resistances based on a chosen value for R1, a trigger voltage midpoint, and the hysteresis voltage. You can download it from here. Max8211_Calc.xls
I managed to squeeze the circuit onto an 8x8 piece of perf-board which I have drawn in this next diagram. I had some quite small 10kΩ and 100kΩ resistors available so if you are trying to make this layout yourself you may need to make some small modifications to fit larger resistors if you are using them.
Having the LED on a long wire allows me more flexibility for mounting the circuit board in the wing while still allowing the LED to be installed somewhere where it can be seen.